自软件上一个版本发布以来,CENIT有幸收到来自全球用户的大量宝贵反馈。本次软件新版本R2022针对用户建议进行了一系列功能改进,极大地提升了用户体验。
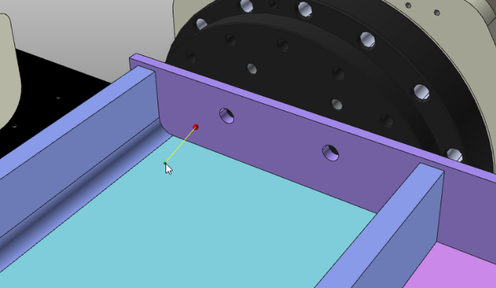
焊接 | 自动寻位功能
寻位功能旨在精确地寻找焊缝在真实零件上的位置(由于加工过程一定存在误差,真实焊缝位置与CAD数据上焊缝位置存在偏差)。为此,在焊接之前机器人需要进行寻位操作(通过焊枪或焊丝寻位),离线编程可以使这一过程更高效。在新版本中,飞思德提供了更灵活、更直观的寻位动作编辑功能,机器人可以自动生成软件内定义好的寻位路径,同时也可以手动快速地调节工件上寻位的具体位置。利用离线编程可以大幅缩短寻位编辑时间,从而显著提升使用者的工作效率。
程序复制/镜像/迁移

新版本中飞思德提供了一个全新的界面,将复制、镜像和迁移等功能在一个面板中进行了整合于优化。可大幅简化具有多道相似轨迹的工件的编程过程,减少单调的重复性操作,极大地提升了编程效率。
轻松将离线程序复制到其它控制器
用户现在可以在对一台机器人编程后,把整套离线编程程序复制到另一台机器人上。
在现实加工场景中,有时会存在某台机器人突然失灵的情况。此时需要利用另一台机器人来完成加工作业。飞思德新版本的复制功能可以把程序从一个控制器复制到另一个控制器上,无需对机器人的重新编程,只需验证在复制程序后新的机器人的运行情况(不同的机器人末端可能导致意料之外的碰撞,而不同的轴运动限制可能导致无法到达既定位置),从而节省大量时间。
优化对轨迹质量的评估
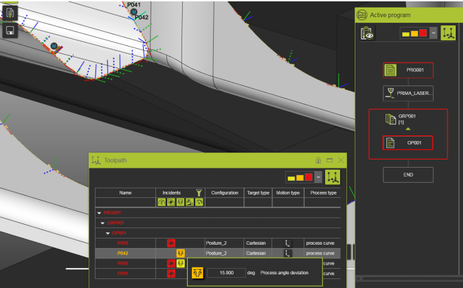
在新版本中提供了全新的基于成本函数(Cost function)和用户自定义的目标的轨迹质量算法。用户可以预先设定和单独调整所有目标标准,以满足各类加工工艺和加工单元的不同需要。软件中也提供了鲜明的色彩显示,不同应用场景下的各类轨迹属性将一目了然地呈现在界面上。与其他属性设置类似,用户也可以快速地保存自定义标准数值。
用于分析轨迹质量的属性值包括:
- 可达性 (开/关)
- 碰撞检测(开/关)
- 加工角度(可分4级调节)
- 轴限制(可分4级调整)
- 轴线运动或抖动(可分4级调节)
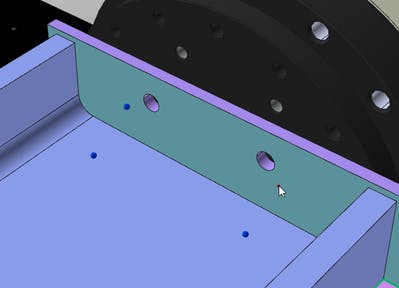
焊接 | 角焊焊缝定义
飞思德新版本的这一新功能大大简化了焊接编程。在旧版本中,在离线编程前必须提前定义工件的加工轨迹,并且大多数情况下需要重复多次轨迹编辑操作。现在用户可以在工件上通过简单的拖拽来完成焊缝的定义和编程。此功能还支持直接对CAD模型编程,而模型的边缘可以是不平滑的,甚至可以是有空隙的,正如现实世界中的实际加工对象。
激光切割 | 通过脚本修改现有的离线编程程序
通过导入测试数据测量记录来改变程序周期或自动纠正激光切割路径。
这一新功能开启了无限多的可能性。比如用户可以在调整后将离线编程项目与机器人的真实程序 “合并 “起来。其可用于将在一台机器人上手动修改和优化过的程序转移到另一个零件或类似的工件上,避免对整个产品进行完全的重新编程。







 苏公网安备 32059002003696号
苏公网安备 32059002003696号